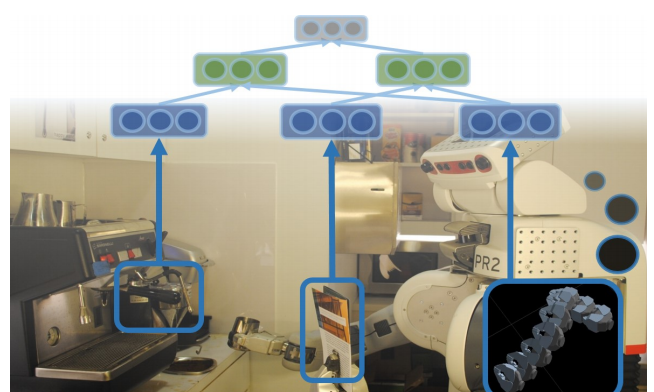
RoboBrain contains knowledge from different sources stored as a graph . With our API , one can push and retrieve this knowledge. With our query language RaQueL , one can enable several robotics applications.
Please wait while we query the roboBrain and obtain the heatmap.
Output
Console Messages
The assistive robots working with humans should be able to understand human activities and also anticipate the future actions that the human can perform. In order to anticipate, the robot should reason over the action possibilities in the environment, i.e., object affordances, and how the actions can be performed, i.e., trajectories.
Play with RaQueL online
Robotic Applications
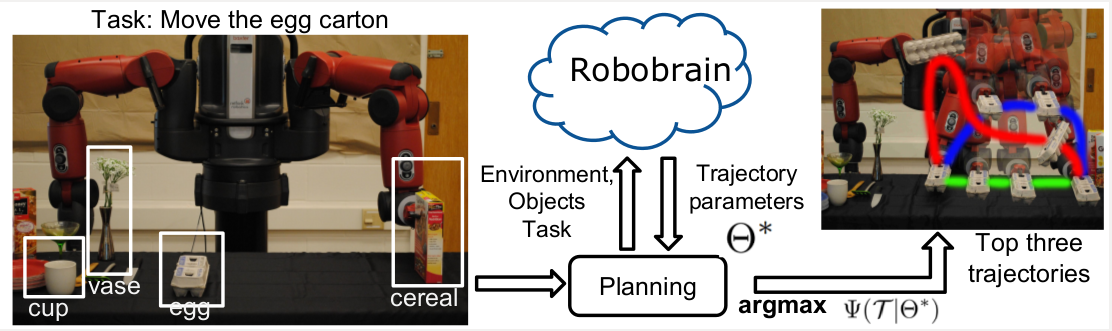
PlanIt
A Crowdsourcing Approach for Learning to Plan Paths from Large
PlanIt uses RoboBrain to fetch trajectory parameters from different attributes computed from user preferences. You can try the example below.
Please wait while we query the roboBrain and obtain the heatmap.
Select files
Choose Multiple FilesUpload queue(Max items:2)
Queue length: 0
| Name | Size | Progress | Status |
|---|
Queue progress:
Output
Console Messages
RaQueL query
trajectories = fetch("({handle:'egg_carton'})-[e:`IS_TRAJECTORY_OF`]-()") Anticipation
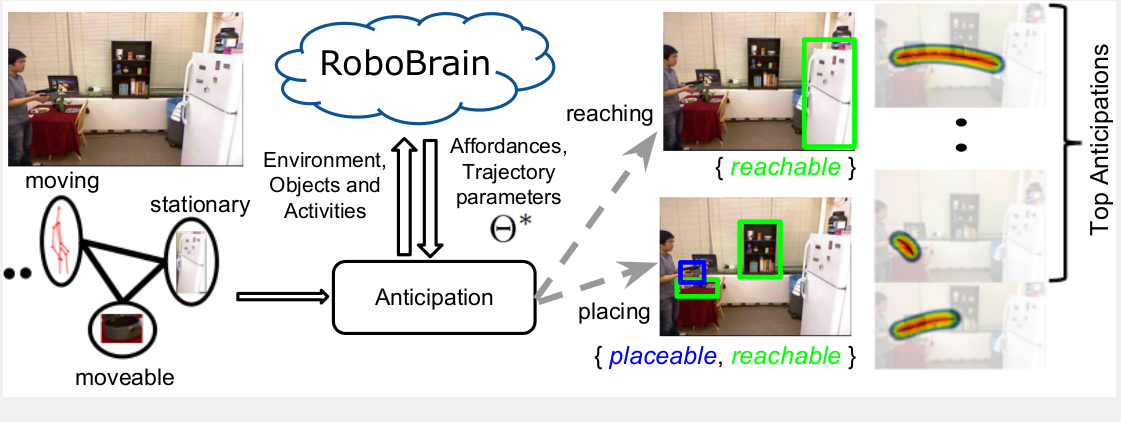
Anticipating Human Activities for Reactive Robotic Responses
The assistive robots working with humans should be able to understand human activities and also anticipate the future actions that the human can perform. In order to anticipate, the robot should reason over the action possibilities in the environment, i.e., object affordances, and how the actions can be performed, i.e., trajectories.
RaQueL query
trajectories = fetch("({handle:'standing_human'})-[e]-({handle:'refrigerator'})")
anticipated_trajectory = SortBy(trajectories, 'Belief') Partner Projects
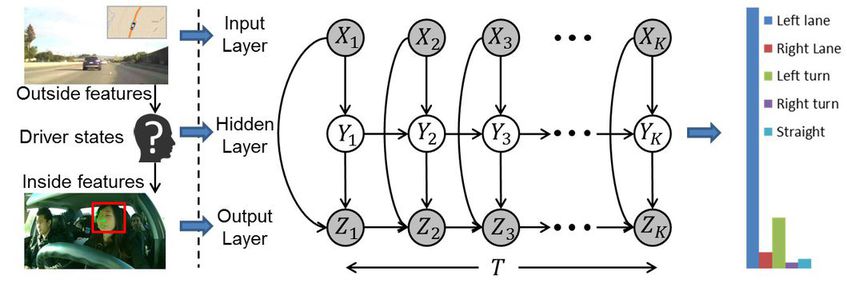
Brain4Cars
Intelligent car cabin sensing